对象建模
简单介绍了对象建模的几种方法与技术,包括从二维图形绘制到三维点云、多边形网格、分割曲面,以及隐式与参数化表面的应用,同时还简述了构造实体几何 (CSG) 和分形的特性及其构建方式。
CG-01 对象建模
1. 二维绘图 (2D Drawing)
二维绘图是将对象转换为像素模式并更新帧缓冲区中的对应像素。
- 直线绘制
- 使用算法(如Bresenham算法)优化像素选择,通过整数运算高效绘制直线。
- 判断线段与像素的接近程度,选择最接近的像素进行着色。
- 圆形绘制
- 通过对称性减少计算量,逐步绘制圆的像素。
- 区域填充
- Flood-fill算法:递归填充区域,分为4方向和8方向填充。
- 检查当前像素是否为边界颜色或填充颜色,若不是则填充并递归处理相邻像素。
2. 三维点云 (3D Point Clouds)
三维点云是无结构的三维点样本集合,每个点包含几何信息(如坐标)及其他属性(如颜色、法向量)。
数据采集方式:
- 激光雷达(Lidar):通过红外光脉冲测量距离。
- 结构光:通过投影光栅图案获取深度信息。
- 多视图计算机视觉:从多个视角重建三维点云。
优势:
- 实时采集:适合实时应用(如自动驾驶)。
- 无需拓扑信息:点云本身不包含连接信息,处理简单。
劣势:
- 几何计算困难:缺乏拓扑结构,难以直接进行表面重建。
- 拓扑连接信息缺失:需要额外处理以生成网格或其他结构。
特殊处理:
- 结构化点云:将点云表示为二维图像,利用成熟的图像处理技术进行分析。
3. 多边形网格 (Polygon Meshes)
多边形网格通过顶点 (V)、边 (E)、面 (F) 表示多面体对象的形状。
-
每个面可以通过定义顶点的排列顺序来指定方向。
- 方向可以是**逆时针 (counter-clockwise) 或顺时针 (clockwise) **。
-
方向决定了面的法向方向。通常,逆时针顺序是“正面”。
-
可以使用右手法则 (Right-hand rule) 来进行判断。
-
如果一个网格的所有面都能保持一致的方向(全部逆时针或全部顺时针),并且每条边在其相邻的两个面中有相反的方向,则该网格是**可定向的 (orientable) **。
-
并非所有网格都是可定向的。
- 例如:
- 莫比乌斯带 (Möbius strip)
- 克莱因瓶 (Klein bottle)
- ……
- 例如:
-
欧拉公式:
对于闭合无孔的凸多面体,顶点数 V、边数 E、面数 F 满足关系:
对于具有孔洞或边界的网格,公式需根据曲面属 (Genus) 和边界调整。
-
曲面属 (Genus):
定义为:可以在曲面上绘制的不相交的简单闭合曲线的最大数量,并且这些曲线不会将曲面分割为多个部分。表示曲面的孔洞数量,影响欧拉公式的计算。
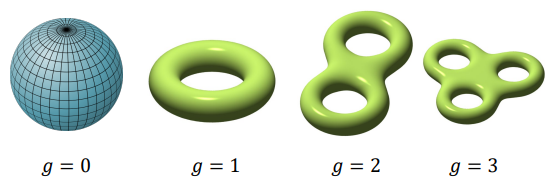
-
对于具有曲面属 g 的封闭且可定向的流形网格,顶点 (V)、边 (E) 和面 (F) 的数量之间的关系, 由欧拉公式给出:
, 其中
被称为欧拉示性数 (Euler characteristic)。
-
对于具有曲面属 g 和 b 个边界的可定向流形网格 (orientable manifold mesh),欧拉公式为:
数据结构:
- 面-顶点表:记录顶点坐标和面信息。
- 半边结构:支持高效的拓扑操作。
- 其他结构:如翼边结构、四边结构等。
优势:
- 支持任意几何和拓扑结构。
- 可表示锐边特征,支持自适应细化。
- 渲染效率高。
劣势:
- 平滑变形困难。
- 多边形边界在近距离观察时可能明显。
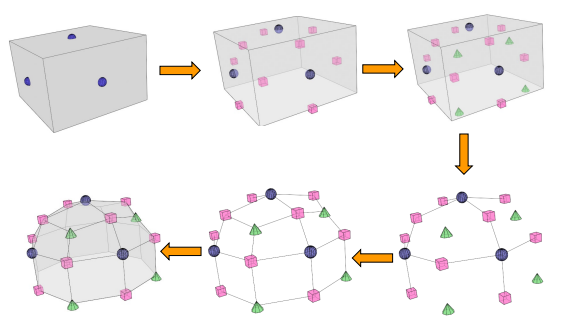
4. 分割曲面 (Subdivision Surfaces)
分割曲面通过递归细化生成平滑曲面。
常见方法:
-
Catmull-Clark算法:适用于四边形网格,生成平滑曲面。
-
Loop算法:适用于三角形网格。
-
Doo-Sabin算法:生成平滑的多边形曲面。
-
Butterfly算法:插值细分算法。
应用:
- 复杂曲面建模,适合需要高平滑度的场景。
5. 隐式表面 (Implicit Surfaces)
隐式表面通过隐式函数 
特性:
- Signed Distance Field (SDF)
- 定义点到表面的最近距离。
表示表面,
表示在内部,
表示在外部。
优势:
- 高效判断点是否在表面内。
劣势:
- 难以生成表面上的具体点。
- 难以拼接多个隐式表面并保持连续性。
- 难以表示隐式表面的有限部分。
6. 参数化表面 (Parametric Surfaces)
参数化表面通过参数化方程定义,通常使用两个参数 s,t 控制表面形状。
参数化曲线 (三次参数多项式)
-
U 是一个 1×4 的参数矩阵,形式为:
其中
-
P 是一个 4×1 的矩阵,称为几何矩阵 (geometry matrix):
它表示一组控制点,用于操控曲线的形状。
-
M 是一个 4×4 的矩阵,称为基矩阵 (basis matrix):
它定义了曲线的基本属性,例如曲线的类型、控制点的影响区域,以及曲线是否通过两个端点的控制点。 -
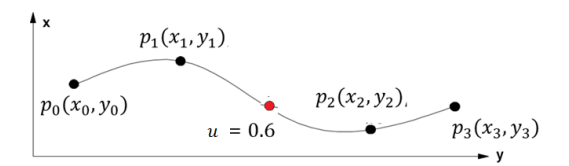
假设 p0(x0,y0)、p1(x1,y1)、p2(x2,y2)、p3(x3,y3) 是四个控制点。给定基矩阵 M 的值,我们可以通过改变参数 u 的值,计算出曲线上任意点的 x 和 y 坐标,生成曲线图形。
参数化曲面 (Parametric Surfaces)
-
S 和 T 是参数 s 和 t 的 1×4 矩阵,形式为:
,
, 其中
。
-
P 是一个 4×4 的矩阵,称为几何矩阵 (geometry matrix)。
它是一组控制点的集合,用于操控曲面形状。 -
M 是一个 4×4 的矩阵,称为基矩阵 (basis matrix)。
它定义了曲面的基本属性,例如:曲面的类型、每个控制点的影响范围,以及曲面是否通过两端的控制点。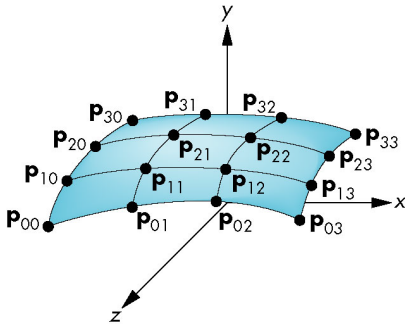
优势:
- 易于实现平滑变形,通过修改控制点即可调整表面形状。
劣势:
- 渲染开销较高,需要对每个参数组合进行计算。
7. 体素表示 (Voxel Representation)
没讲
体素是三维像素,用于表示对象的体积。
特性:
- 适合体积建模和体绘制。
- 常用于医学成像、地形建模等领域。
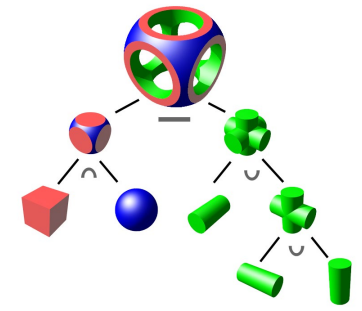
8. 构造实体几何 (Constructive Solid Geometry, CSG)
通过布尔操作(如并集、交集、差集)组合简单对象生成复杂实体。
关键操作:
- 并集 (Union):合并两个对象。
- 交集 (Intersection):保留两个对象的公共部分。
- 差集 (Difference):从一个对象中减去另一个对象。
优势:
- 操作可逆,易于修改。
- 适合复杂实体的建模。
劣势:
- 修改后需重新计算所有操作。
- 计算开销较大。
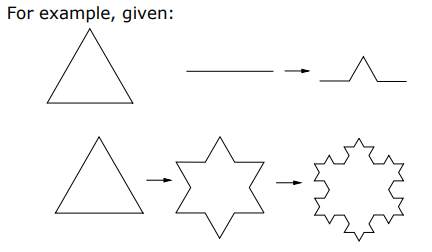
9. 分形 (Fractals)
分形对象具有自相似性,适用于自然场景(如山脉、树木、海岸线等)的建模。
生成方法:
- 通过递归函数生成细节。
- 引入随机因子(如随机调整宽度、高度、位置)以提高真实感。
优势:
- 生成细节丰富的对象。
劣势:
- 无限分辨率的细节可能不符合真实物体的特性。