VR 简介
第一节课简单介绍了VR的定义与类型,VR系统,提到了一些物理设备。
VR-01 Introduction
0. 总结 ☁️
- 虚拟现实(VR)是一种多感官交互技术,包括视觉、听觉、触觉等感官模拟。
- VR 共有四个层级:被动型、探索型、交互型、协作型。
- 支持VR系统的设备包括头戴式显示器(HMD)、电子手套和位置传感设备。
- VR 系统流行的四个类别:沉浸式VR (360°)、非沉浸式VR (视野受限)、增强VR (虚实结合)、远程呈现 (远程机器人交互)
- 常用的位置追踪技术包括磁性追踪和超声波追踪,支持用户在虚拟空间中精确操作。
1. 什么是虚拟现实 (Virtual Reality, VR)?
1.1 定义
VR 是一种人机交互界面,包含以下特点:
- 实时模拟 (Real-time simulation)
- 通过交互 (Interactions)
- 使用多种感官通道 (Multiple sensorial channels)
这些感官通道可能包括视觉 (visual)、听觉 (auditory)、触觉 (tactile)、嗅觉 (smell) 和味觉 (taste)。
1.2 VR四个层级
-
被动型 (Passive):
- 用户几乎没有控制权,例如观看电影或阅读书籍。
- 无法修改内容。
-
探索型 (Exploratory):
- 用户可以通过移动探索虚拟世界。
- 无法修改内容。
-
交互型 (Interactive):
- 用户可以在虚拟世界中探索并互动,例如:
- 伸手抓取虚拟书籍。
- 移动虚拟房间中的家具。
- 用户可以在虚拟世界中探索并互动,例如:
-
协作型 (Collaborative):
- 多个用户可以彼此互动,共同完成虚拟世界中的某些目标。
注意:VR主要关注第2、3和4层次。
1.3 VR主要特点
- VR 允许用户在实时模拟环境 (real-time simulated environment) 中进行交互(如同真实生活中的互动)。
- 交互通过多种感官进行。
1.4 VR设备
为了支持多感官交互,需要使用不同类型的接口设备:
- 输入设备 (Input devices): 人到电脑
- 输出设备 (Output devices): 电脑到人
- 有些设备可能同时包含输入和输出功能的设备
2. 人机交互界面 (Human Computer Interfaces, HCI)
2.1 概述
HCI 的重点在于:
- 捕获用户的交互指令 (输入 input)。
- 让计算机分析这些指令并生成反馈给用户的反应 (输出 output)。
人类通常通过多种感官彼此互动。目标是在人机交互中支持类似的互动方式。
2.2 视觉
视觉在人类互动中起着至关重要的作用:
-
增强现实感 (Enhanced Realism):
研究提高了计算机图像合成的现实感和渲染速度,使计算机能够向用户呈现更加真实和互动的虚拟世界。 -
理解用户行为 (Understanding User Behavior):
研究还增强了计算机视觉技术,用于解读用户的世界。然而,由于视觉理解的复杂性,这仍然是一个挑战。
2.3 声音
- 音频为人类提供了一种直接交换想法的方法。
- 它帮助个体感知周围环境,例如检测接近的汽车及其大致距离。
- 对于计算机来说,生成声音比识别声音更容易。
- 深度学习的最新进展显著提高了音频识别的性能。
2.4 手势
- 手势传递了大量信息。
- 可以通过3D图像轻松呈现手势。
- 各种电子手套可用于捕获人类手部动作。
2.5 其他感官
- 嗅觉 (Smell):
- 产生气味相对简单,但一旦产生后清除气味则很困难。
- 有些气味容易检测,而另一些则较难。
- 嗅觉集成在当前的虚拟现实应用中很少被考虑。
- 触觉感知 (Tactile Sensing):
- 触觉感知涉及检测和施加力。
- 压力传感器 (Pressure sensors) 可检测用户施加的力并作为计算机的输入。
- 机械或液压设备 (Mechanical or hydraulic devices) 可为用户生成物理力输出。
- 然而,这种设备通常是侵入式的,因为即使在未使用时用户也能感受到它的存在。
2.6 计算机视觉的挑战
- 传统的计算机视觉技术专注于像素 (pixels),而像素是低级数据。这限制了从像素中恢复高级语义信息的能力。
- 深度学习的进步引入了从图像/视频中提取高级语义的技术。
3. VR系统的类型
为了满足不同应用需求,已开发出多种虚拟现实系统。这里讨论了四种最流行的类别:
- 沉浸式虚拟现实 (Immersive VR)
- 非沉浸式虚拟现实 (Non-immersive VR)
- 增强虚拟现实 (Augmented VR, AR)
- 远程呈现 (Telepresence)
沉浸式和非沉浸式VR 通常被统称为虚拟现实(VR)。
远程呈现技术与机器人学相关联。
3.1 沉浸式VR
-
它将用户完全沉浸在模拟环境中。
-
由于视觉交流在人类互动中起着重要作用,沉浸式VR系统强调视觉沉浸感。
-
通常使用配备头部跟踪功能的头戴式显示器 (Head Mounted Display, HMD) 来提供虚拟的360°视野——头部跟踪器检测用户头部的位置/方向,以便图形系统渲染适当的图像并显示在HMD上。
-
某些系统可能使用多块大型投影屏幕从视觉上环绕用户,例如CAVE系统。
-
其他系统可能提供类似真实环境的体验,例如在类似驾驶舱的房间中进行飞行模拟,或在类似汽车的场景中进行汽车模拟。
3.2 非沉浸式VR
-
与沉浸式VR不同,非沉浸式VR系统不提供360°全景视图。用户通常只能通过计算机屏幕进行显示。因此,非沉浸式VR也被称为“有限现实”。
-
成本低——使用传统显示器进行视觉输出。
-
某些系统可能使用额外的设备,例如立体眼镜,来提供立体视觉。例如,CrystalEyes眼镜配有两个可控镜片,可以编程为与显示图像同步交替允许/阻止光线通过,从而提供立体视觉。大多数3D电视也采用了类似的技术。
3.3 增强VR (AR)
-
增强VR是使用透明眼镜,将数据、图表、动画或视频投影到眼镜上,使用户能够在看到真实世界的同时获得计算机提供的附加信息。
-
常见的两种显示形式包括:
-
一种是单片或双片镜片,上面安装了一个小型投影仪,能够将视频图像投射到镜片上。
-
另一种是飞行头盔,通常用于战斗机飞行员。头盔上装有小型投影仪,可以将来自计算机的关于环境的额外信息投射到透明屏幕上,即护目镜上。
-
-
高级立体显示器能够直接从屏幕中提供立体图像,而无需用户佩戴任何眼镜。这种显示器已经上市,但通常不太流行。
-
在非沉浸式VR中,用户只有在注视屏幕时才处于虚拟世界中。
3.4 远程呈现
-
远程呈现技术允许用户观察远程场所,并通过控制远程机器或机器人完成某些任务。通常,用户与远程机器人之间存在双向通信。(遥控是单向的)
-
摄像头、麦克风和其他传感器通常安装在远程机器人上。这些传感器发送的信号会被传输到控制室内的人类操作员。操作员可能配备头戴式显示器(HMD)及其他设备以渲染这些远程信号。
-
人类操作员也会佩戴一些传感器,例如位置跟踪器和电子手套,用于感应操作员的动作。这些信号会被发送至远程机器人以控制其动作。
4. 位置传感器 (Position Sensors)
为了在虚拟世界中进行探索或交互,计算机需要捕捉用户的物理坐标。以下是一些跟踪方法:
-
2D鼠标 (2D Mouse):
虽然2D鼠标非常便宜且始终可用,但在3D世界中使用较为困难。此外,它仅返回相对(非绝对)的鼠标移动信息。 -
机器追踪器 (Mechanical Tracker):
机械手臂连接到一个控制手柄,手柄的移动带动机械手臂的移动,从而生成位置信号。这种设备反应快速且精确,但运动范围受限(受机械臂长度的限制)。
5. 典型的沉浸式VR系统
典型的沉浸式VR系统配置可能包括:
- 头戴式显示器(HMD)
- 电子手套或某种类型的运动传感器
- 一组位置跟踪设备
- 3D图形工作站
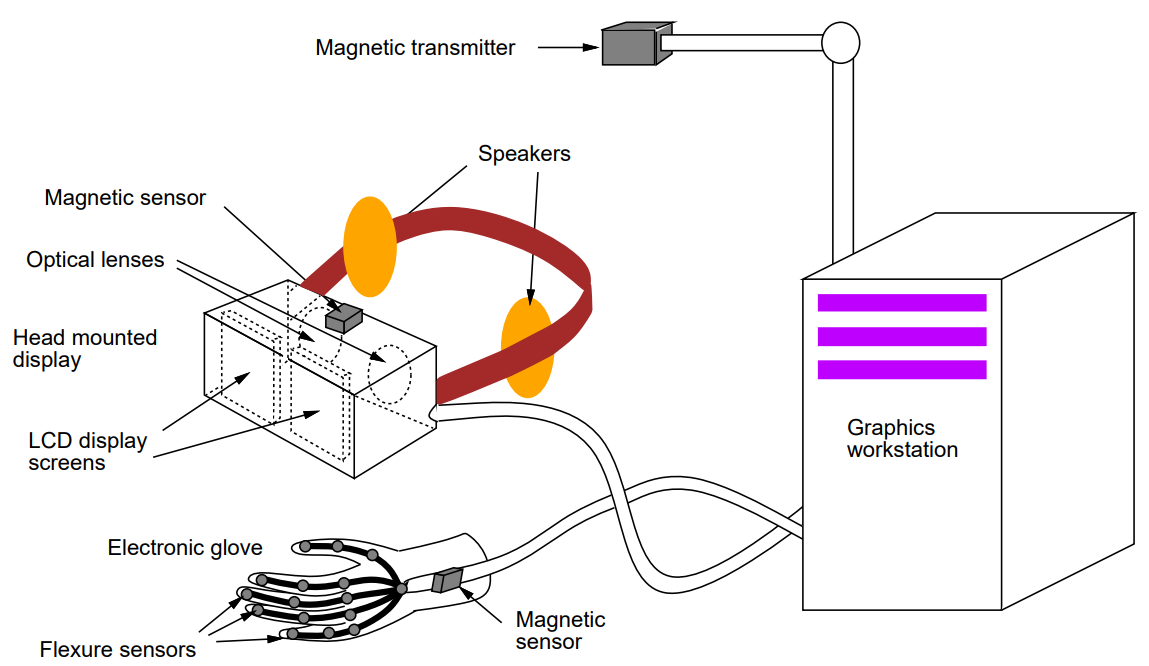
5.1 HMD 和电子手套相关组件
-
头戴式显示器 HMD:
HMD包含一对LCD屏幕和一对光学镜片,可为用户提供立体视觉。此外,HMD还配备了一对扬声器,用于立体声输出。 -
电子手套 (Electronic Glove):
电子手套内部包含大量传感器,用于检测手指弯曲动作,因此能够识别手势。 -
磁性追踪系统 (Magnetic Tracking System):
磁性追踪系统用来跟踪身体部位的位置。 -
传感器附件 (Sensor Attachments):
通常,一个磁性传感器固定在HMD上,同时两个传感器固定在电子手套上,以跟踪用户头部和手部的位置及方向。
5.2 图形工作站功能
- 图形工作站可以实时生成立体图像,并将其发送到HMD内部的两个显示屏上。
- 通过在虚拟世界中设置两台虚拟摄像机,对应用户两只眼睛的位置,生成两组图像序列,分别提供给左右眼。
- 当用户移动头部时,显示屏上的图像会随头部的特定位置实时更新。
- 当用户移动双手时,计算机也能感知手部在3D空间中的位置及手势,从而实现对虚拟世界中物体的控制。
5.3 磁性追踪器
- 磁性追踪是广泛使用的方法之一。一个磁性发射器固定在某个位置,磁性传感器安装在需要被追踪的物体上。
- 这种方法通常更精确,但容易受到磁场和大型金属物体的干扰。
5.4 超声波追踪器 (Ultrasonic Tracker)
- 超声波发射器安装在被追踪的物体上,并在不同的位置放置多个传感器。
- 通过比较传感器接收到超声波信号所耗费的时间,可以确定物体的位置。
- 超声波系统价格低廉,但分辨率较低,且容易受到噪声干扰。
6. 延迟
所有虚拟现实系统都存在延迟问题。请考虑以下虚拟现实系统:
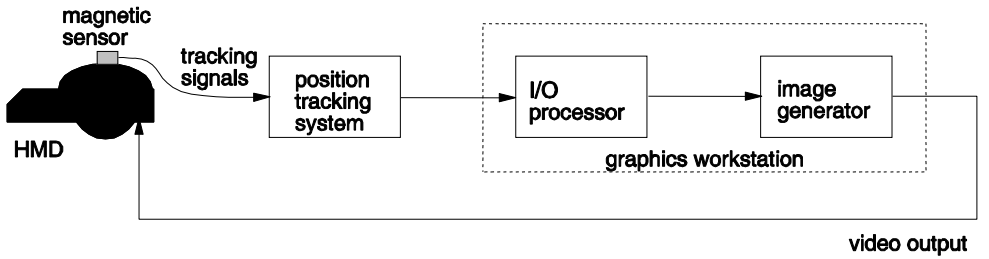
延迟问题的描述
- 当数据库更新后,图像生成器会根据更新后的数据库渲染更新的图像。这其中也会存在延迟。
- 因此,从头部移动到屏幕上的图像更新以反映头部移动的时间被称为系统总延迟 (total system lag)。
- 这种时间延迟可能会让用户感到不适,这是由于视觉感知与大脑预期之间的差异造成的。
延迟问题的组成部分
- 磁传感器延迟
- 当我们移动头部时,磁传感器会感知到变化并生成信号。
- 从我们移动头部到信号生成之间会存在延迟。
- 追踪系统处理延迟
- 当追踪系统接收到传感器的信号时,它会处理信号以计算传感器的新位置和方向。
- 这个过程中也会存在延迟。
- 数据库更新与渲染延迟
- 当追踪系统发送信息时,计算机会接收该信息,处理它,然后更新数据库。
- 这一过程中也会存在延迟。
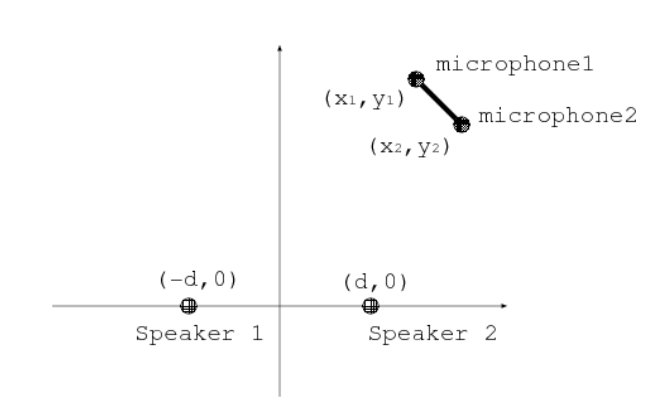
Tutorial 1 超声波追踪器计算位置和朝向 🍁
题目
我们有一个二维超声波追踪器,由两个扬声器和两个麦克风组成。设两个扬声器在世界坐标系中的位置分别为 (d, 0) 和 (-d, 0)。麦克风1分别在 t₁₁ 秒和 t₁₂ 秒后检测到扬声器1和扬声器2发出的超声波信号,而麦克风2分别在 t₂₁ 秒和 t₂₂ 秒后检测到扬声器1和扬声器2发出的信号。请回答以下问题:
(a) 麦克风1的位置是什么?
(b) 追踪器的方向是什么?计算世界坐标系的x轴与追踪器上两个麦克风连线之间的夹角。
解答
使用勾股定理求解。
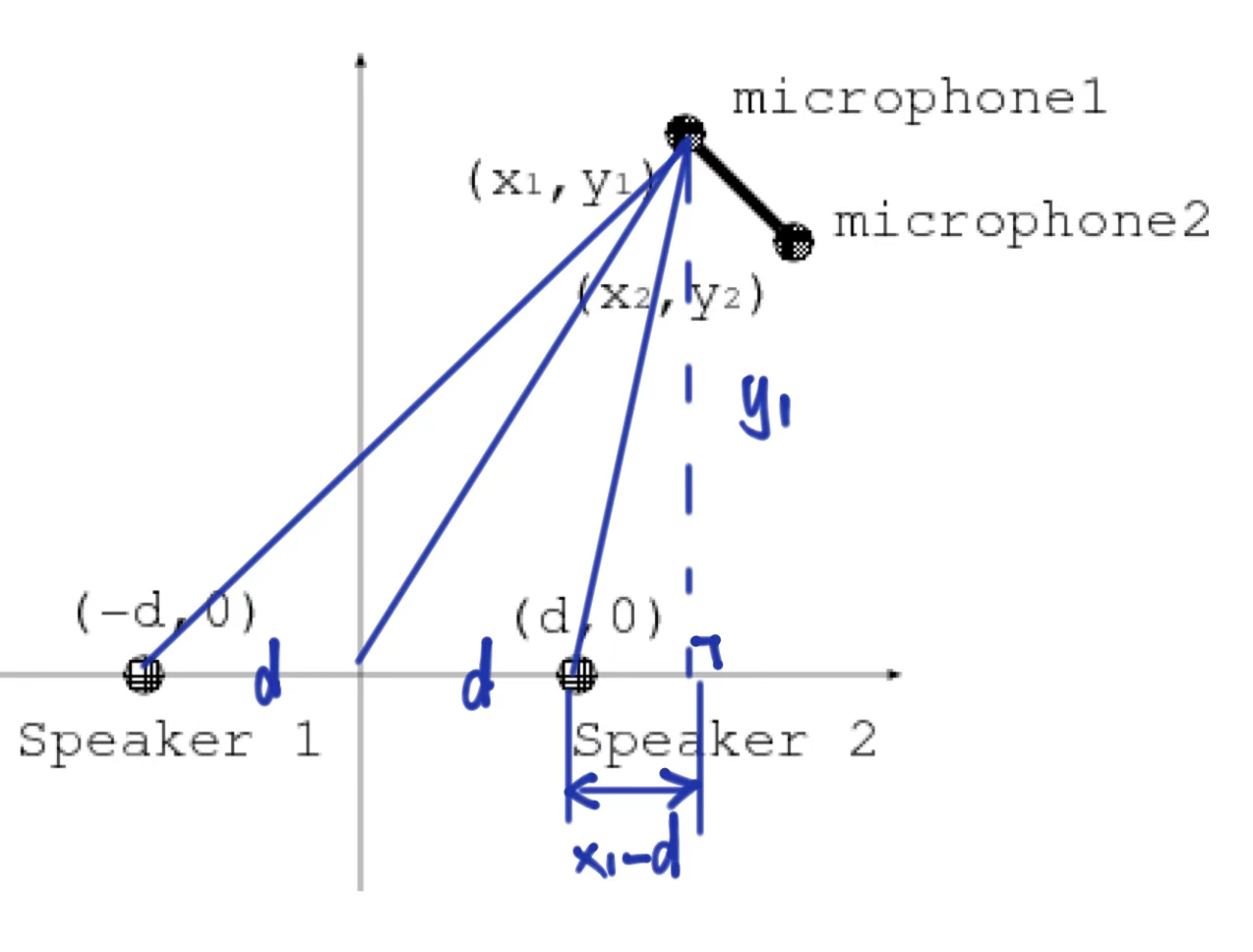
(a) 设超声波的速度为
联立方程求解,两方程相减可得
解得:
(b) 同理,可以得到
夹角